



Esta es una pequeña placa breakout para el controlador doble de motor DRV8833 de Texas Instruments, puede entregar 1,2 A continuamente por canal (2A punta) a un par de motores de corriente continua. Con un voltaje de operación en un rango de 2,7 V a 10,8 V y protección contra voltaje reverso, bajo voltaje, sobre corriente y sobre temperatura, este controlador es una gran solución para la alimentación de motores pequeños, de bajo voltaje.
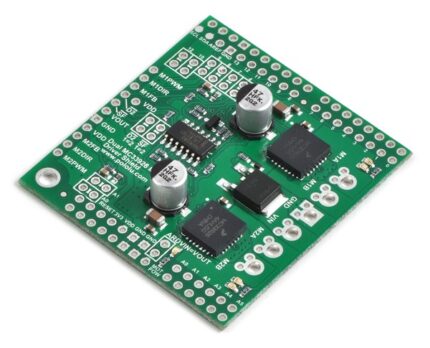
El DRV8833 de Texas Instruments es un IC controlador de motor puente-H doble que se puede usar para el control bidireccional de dos motores cepillados de corriente continua desde 2,7 V a 10,8 V. Puede suministrar hasta alrededor de 1,2 A por canal continuamente y puede tolerar corrientes de hasta 2 A (punta) por canal, durante unos segundos, por lo que es un controlador ideal para pequeños motores que funcionan con voltajes relativamente bajos. La placa trae ensamblados componentes SMD (dispositivos de montaje superficial), incluyendo el DRV8833, y añade un FET (transistor de efecto campo) como protección de batería inversa.
Características:
–
Controlador de motor doble puente-H: puede manejar dos motores de corriente continua o un motor paso a paso bipolar
–
Voltaje de operación: 2,7 V a 10,8 V
–
Corriente de salida: 1,2 A continuos (2A punta) por motor
–
Las salidas se pueden conectar en paralelo para suministrar 2,4 A continuos (4 A punta) a un solo motor
–
Las entradas son compatibles con 3V y 5V
–
Bloqueo por bajo voltaje, y protección contra sobre corriente y sobre temperatura
–
Circuito de protección de voltaje reverso
–
La limitación de corriente puede habilitarse por la adición de resistencias (“sense resistors”) (no incluidas)
Usando el controlador
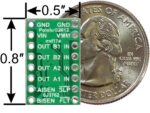
En una aplicación típica, las conexiones de alimentación se hacen en un lado de la placa y las conexiones de control se hacen en el otro. El pin nSLEEP está alto en la placa y se puede dejar desconectado si no se usa el modo espera de bajo consumo de la DRV8833. Cada uno de los dos canales de motores tiene un par de entradas de control, xIN1 y xIN2, que establecen el estado de las salidas correspondientes, xOUT1 y xOUT2; la señal de modulación por ancho de pulso (PWM) se puede aplicar a cada una de estas entradas. Las entradas de control están “baja” internamente, desactivando, por defecto, las salidas del controlador.
El pin nFAULT es una salida de drenaje abierto que el chip lleva a “bajo” siempre que se produce una condición de sobre corriente, sobre temperatura o bajo voltaje. De lo contrario, se mantiene en un estado flotante, así que será necesario conectar una resistencia pull-up externa (o usar una entrada microcontrolador con su pull-up activado) si quiere monitorear las condiciones de falla en el controlador.
Limitación de corriente
El DRV8833 puede limitar activamente la corriente a través de los motores por medio del uso de regulación de corriente PWM de frecuencia fija (interrupción de corriente). Por omisión, esta placa conecta los pines sensores de corriente a tierra, deshabilitando la característica de limitación de corriente. Para activar la limitación de corriente, se puede usar un cuchillo para cortar los puntos de quiebre en la parte posterior de la placa y luego soldar algunas resistencias de detección de corriente adecuadas a las posiciones habilitadas en la parte frontal (imagen 6 de 9, de las que están arriba). Dichas áreas están dimensionados para resistencias de montaje en superficie 1206.
Consideraciones de disipación de energía realistas.
La ficha técnica del DRV8833 recomienda una corriente continua máxima de 1,5 A por canal. Sin embargo, el chip en sí mismo se sobrecaliente a corrientes más bajas. Por ejemplo, en pruebas realizadas en Pololu, a temperatura ambiente sin flujo de aire forzado, el chip fue capaz de entregar 1,5 A por canal por alrededor de un minuto antes que la protección térmica del chip reaccionara desactivando las salidas del motor, mientras que a corriente continua de 1,2 – 1,3 A por canal fue posible sostener durante muchos minutos sin activar el apagado térmico. La corriente que puedas alimentar dependerá de qué tan bien puedas mantener fresco el controlador del motor. La PCB está diseñada para extraer el calor fuera del chip del controlador, pero el rendimiento se puede mejorar mediante la adición de un disipador de calor. Las pruebas de Pololu se realizaron en el ciclo de trabajo del 100%; modulando el motor por ancho de pulso (PWM) introducirá calor adicional proporcional a la frecuencia.
Nota:Este producto puede calentarse lo suficiente como para quemarte mucho antes que se recaliente el chip. Ten mucho cuidado al manipular este producto y los componentes conectados a él.
Hardware incluido
Dos conectores machos de 1 × 8 pines, separados por 2,54 mm (0,1″) se incluyen con el DRV8833, los que pueden ser soldados para usar el controlador con placas perforadas, breadboards, o con conectores hembras de 2,54 mm. (Los conectores se pueden enviar en una sola pieza de 1 × 16 pines, la que se puede romper por la mitad).
Documento y enlace:
–
Ficha técnica de DRV8833
– Página de Texas Instruments para DRV8833