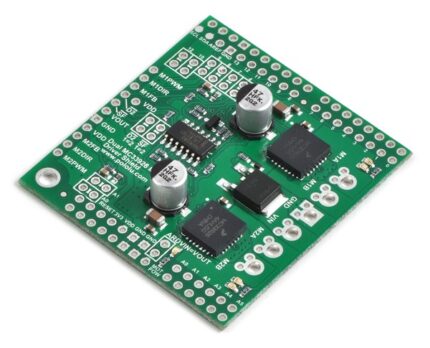

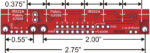

El sensor de reflectancia de QTR-8A está pensado como sensor de línea, pero puede ser usado como sensor de proximidad de uso general, o como sensor de reflectancia. El módulo es un portador de ocho pares emisores y recibidores (fototransistor) de IR uniformemente espaciados en 9,525 mm (0,375 “). Cada fototransistor está conectado a una resistencia pull-up para formar un divisor de voltaje que produce una salida de voltaje análogo entre 0 V y VIN (que es típicamente de 5 V) como una función de la IR reflejada. El bajo voltaje de salida es un indicador de una mayor reflexión.
Todas las salidas son independientes, pero los ledes están dispuestos en pares para reducir a la mitad el consumo de corriente. Los ledes son controlados por un MOSFET con una puerta normalmente alta, permitiendo que los ledes se apaguen mediante el ajuste de la puerta del MOSFET a un voltaje bajo. Apagar los ledes podría ser ventajoso para limitar el consumo de energía cuando los sensores no están en uso o para variar el brillo de los ledes a través del control PWM.
Rompiendo el módulo en dos.
Si no necesita o no encajan ocho sensores a la vez, puede romper el QTR-8A en dos sensores y usarlos como dos módulos separados. Cada una de las piezas funcionará como un sensor de línea independiente.
Especificaciones:
– Dimensiones: 74,93 mm x 12,70 mm x 3,18 mm (2,95 “x 0,5″ x 0,125″) (sin conectores instalados)
– Voltaje de funcionamiento: 3,3 a 5,0 V
– Corriente de alimentación: 100 mA
– Formato de salida: 8 voltajes análogos
– Rango de voltaje de salida: desde 0 V al voltaje suministrado
– Distancia óptima de detección: 3 mm (0,125″)
– Distancia máxima de detección recomendada: 6 mm (0,25”)
– Peso sin conectores: 3,09 g (0,11 oz)
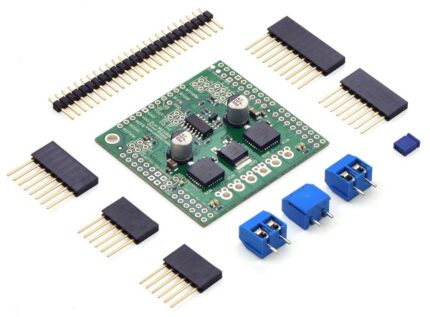
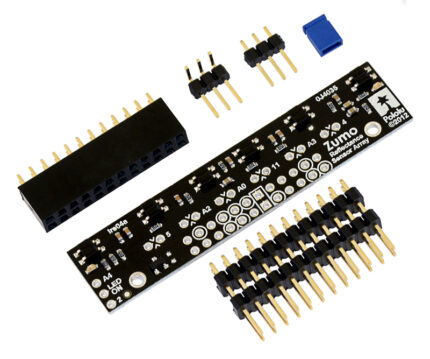
Incluye:
– 1 tira de terminales macho 1 x 25 pines, de 2,54 mm (0,1”)
– 1 resistencia 100 Ohm.
Documentos
– Guía del usuario para el sensor QTR-8A.
– Notas de aplicaciones de los sensores Pololu QTR
– Guía del usuario: Librería Pololu AVR C/C++
– Librería Arduino para los sensores de reflectancia Pololu QTR
– Librería de comandos de referencia Pololu AVR
– Construcción de seguidores de líneas y laberintos de líneas
– Robot Zero: un rápido seguidor de líneas para principiantes